常见问题
一、如何提前规划组件排布的位置,以确保与逆变器、走道板和桥架等设备无干涉?
1、逆变器的位置需放置在距离引下点较近的屋面轮廓处时
方法一: 使用组件排布界面中的“屋面轮廓内缩”输入框整体缩小组件排布的范围。
“屋面轮廓内缩”输入值为内缩的距离,指以屋顶轮廓为基准向内缩小组件可排布的范围(推荐预留5-7m,避免逆变器阴影遮挡)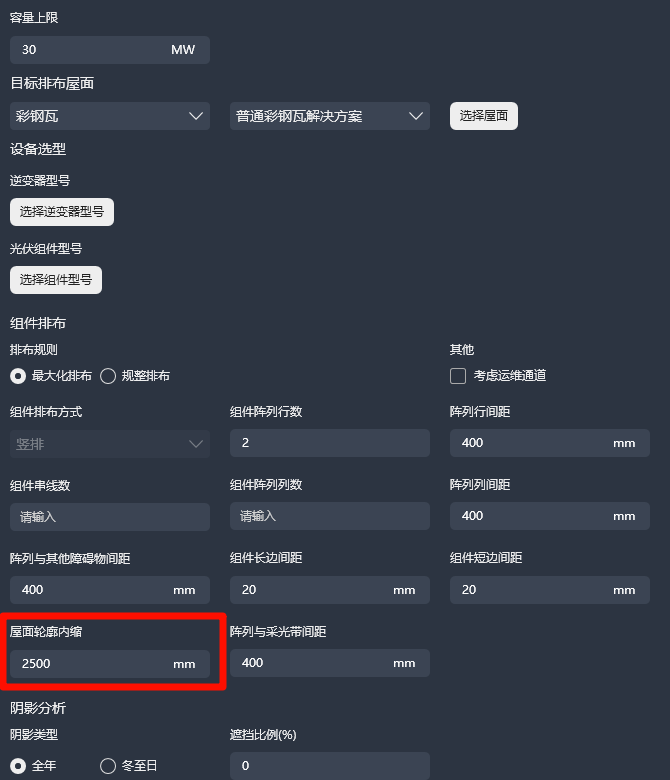
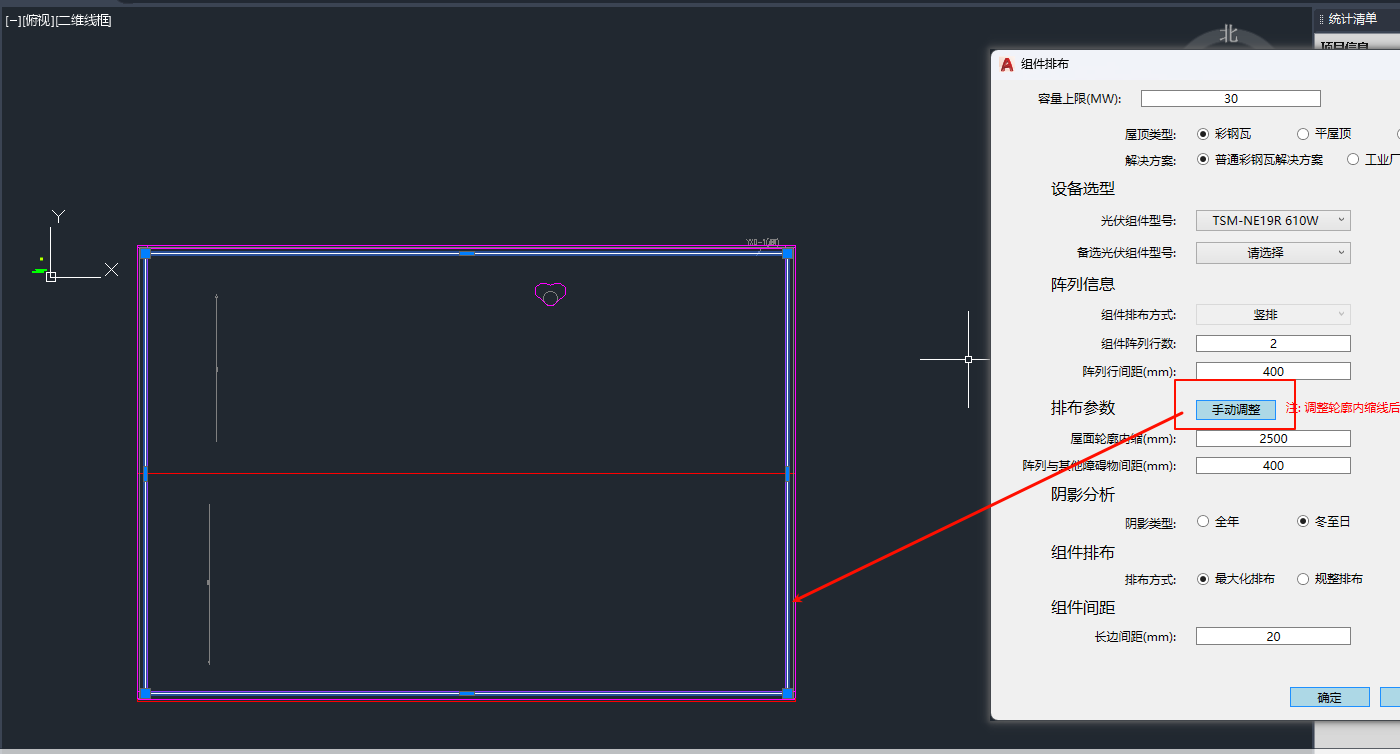
方法二: 手动调整屋面轮廓内缩范围框,针对屋顶轮廓的单边进行详细调整
“手动调整”按钮用于自定义屋面轮廓内缩线。- 点击手动调整,屋面内部出现虚线框,该虚线框为选中状态,修改虚线框的大小形状后,进行组件排布。组件将在该线框内进行排布。
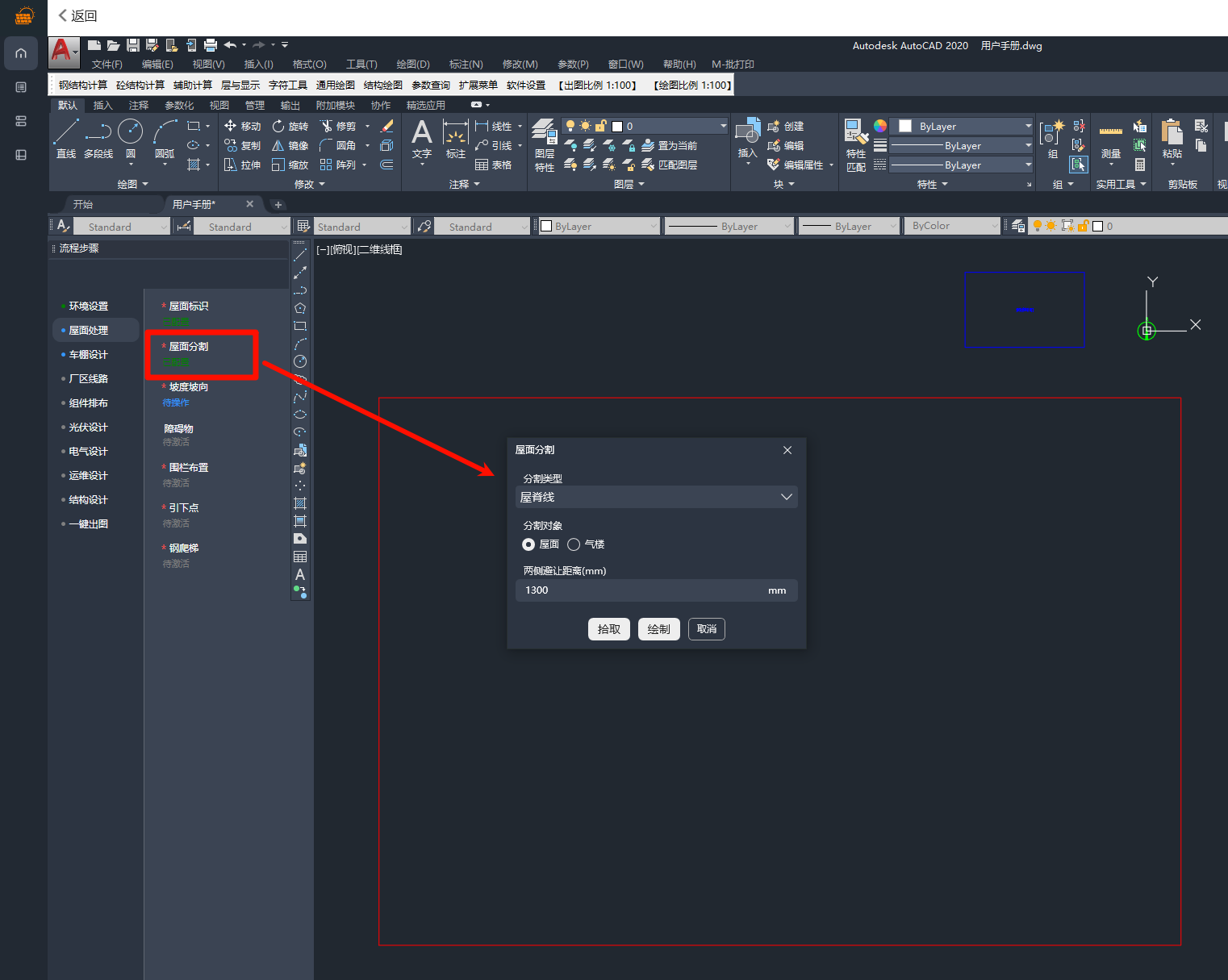
2、逆变器的位置需放置在屋脊线或分割线时
- 可以通过修改屋脊线的避让距离,以避免设备与组件的干涉(推荐预留5-7m,避免逆变器阴影遮挡)
二、如何放置通讯箱、绘制通讯线缆
1、放置通讯设备
- 通讯设备需要放置在总平图上(屋顶轮廓内或)
- 通讯设备需要放置在总平图后,再进行通讯连线
2、绘制通讯线缆
- 通讯线缆用于连接环境监测仪、通讯线缆
- 注意绘制时打开正交以及全部对象捕捉功能
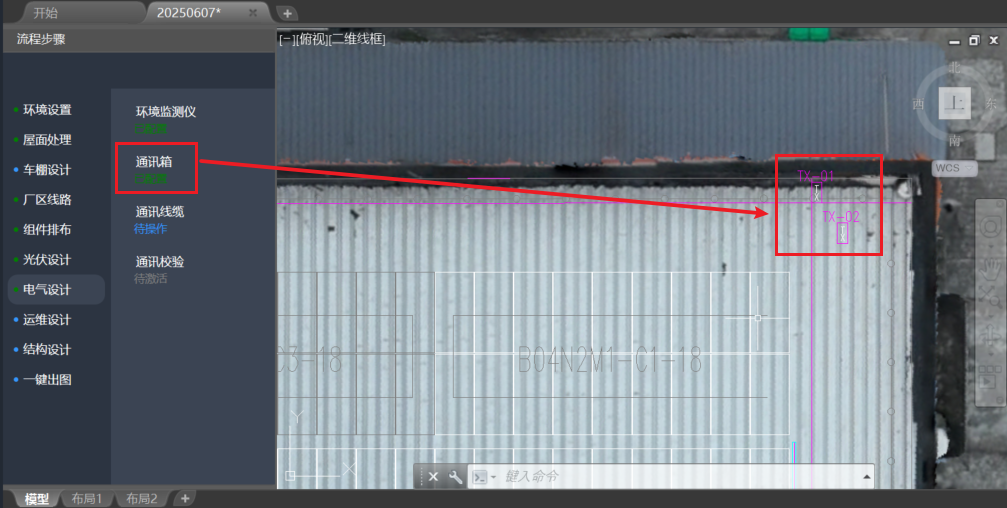
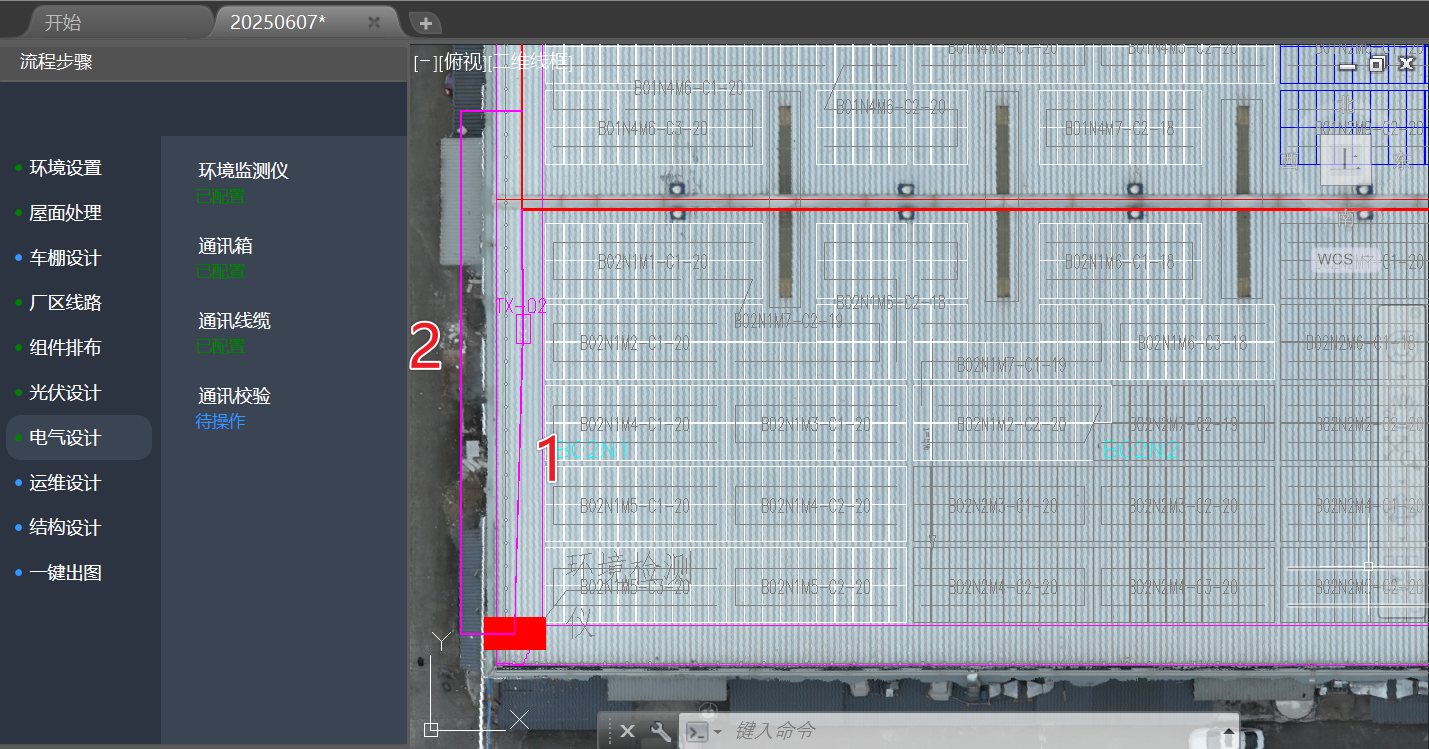
- 通讯设备在屋顶下时,需要连接屋顶的引下点与通讯设备,如下图

- 通讯设备在屋顶上时,通讯设备需要连接交流线缆路径(即图中红色的线缆路径),如下图
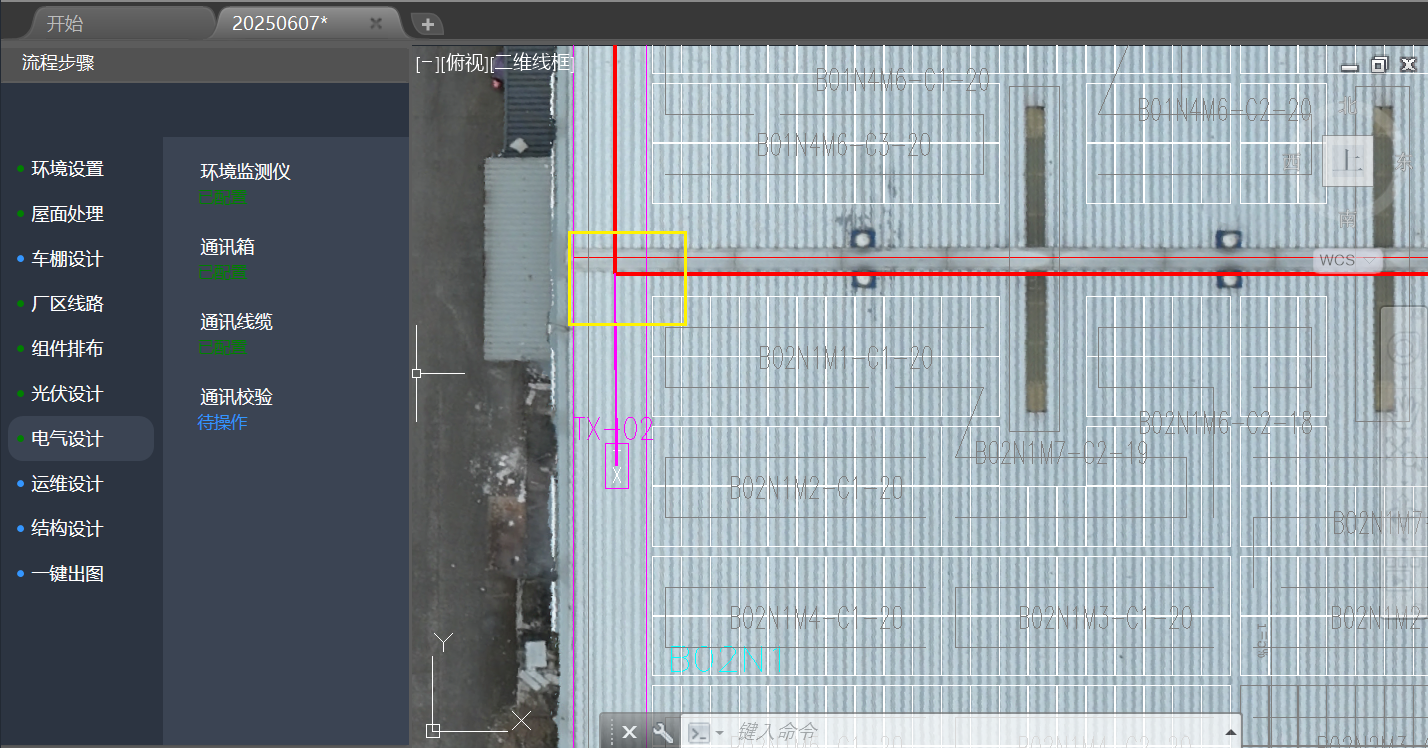
- 环境监测仪连接有两种方案:环境监测仪连接通讯设备;环境监测仪连接交流线缆路径(即图中红色的线缆路径)
三、如何调整不合理的串线
1、删除不合理串线,并运用手动串线按钮进行手动串线
- 手动串线分为
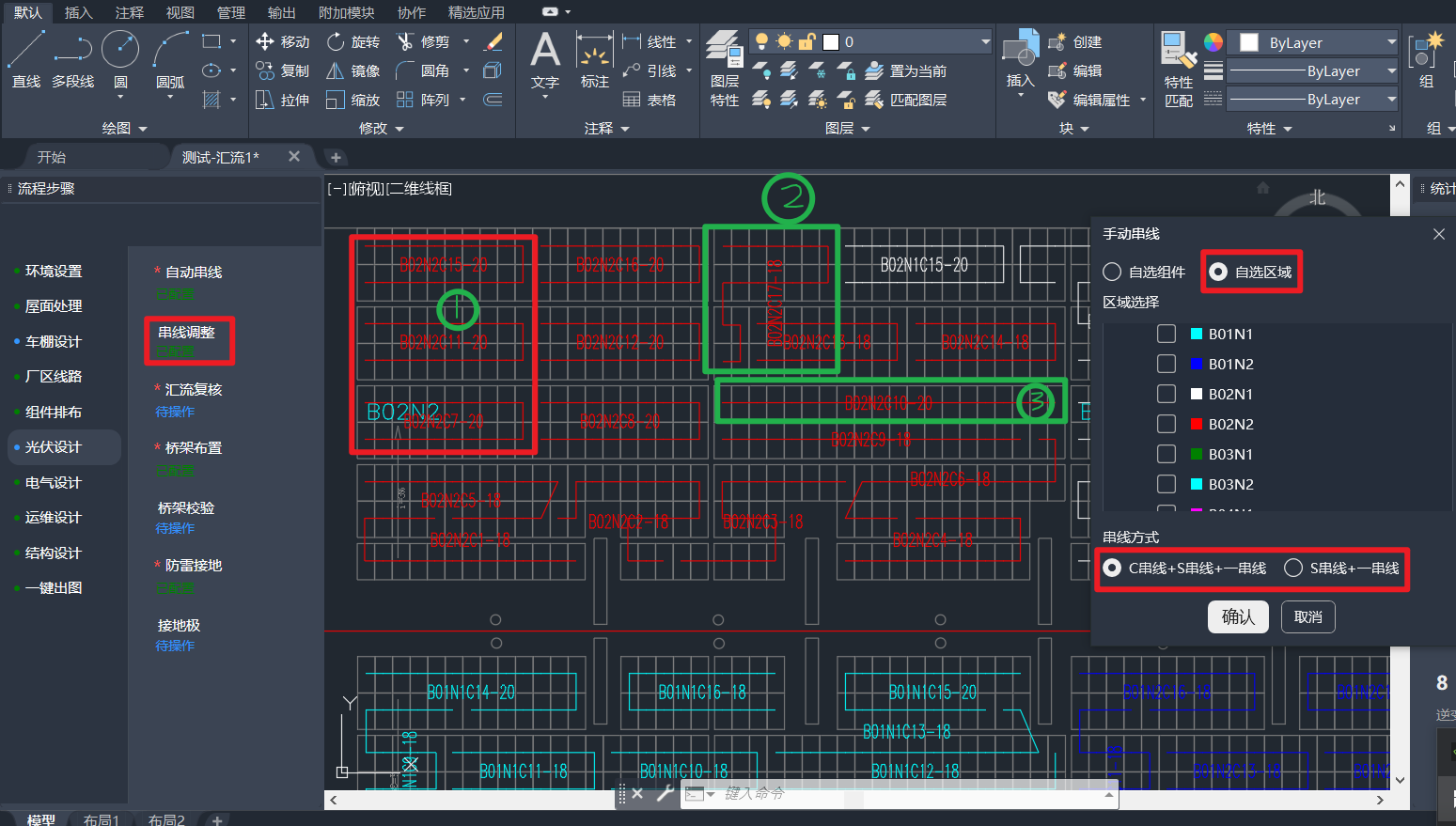
自选组件和自选区域两种
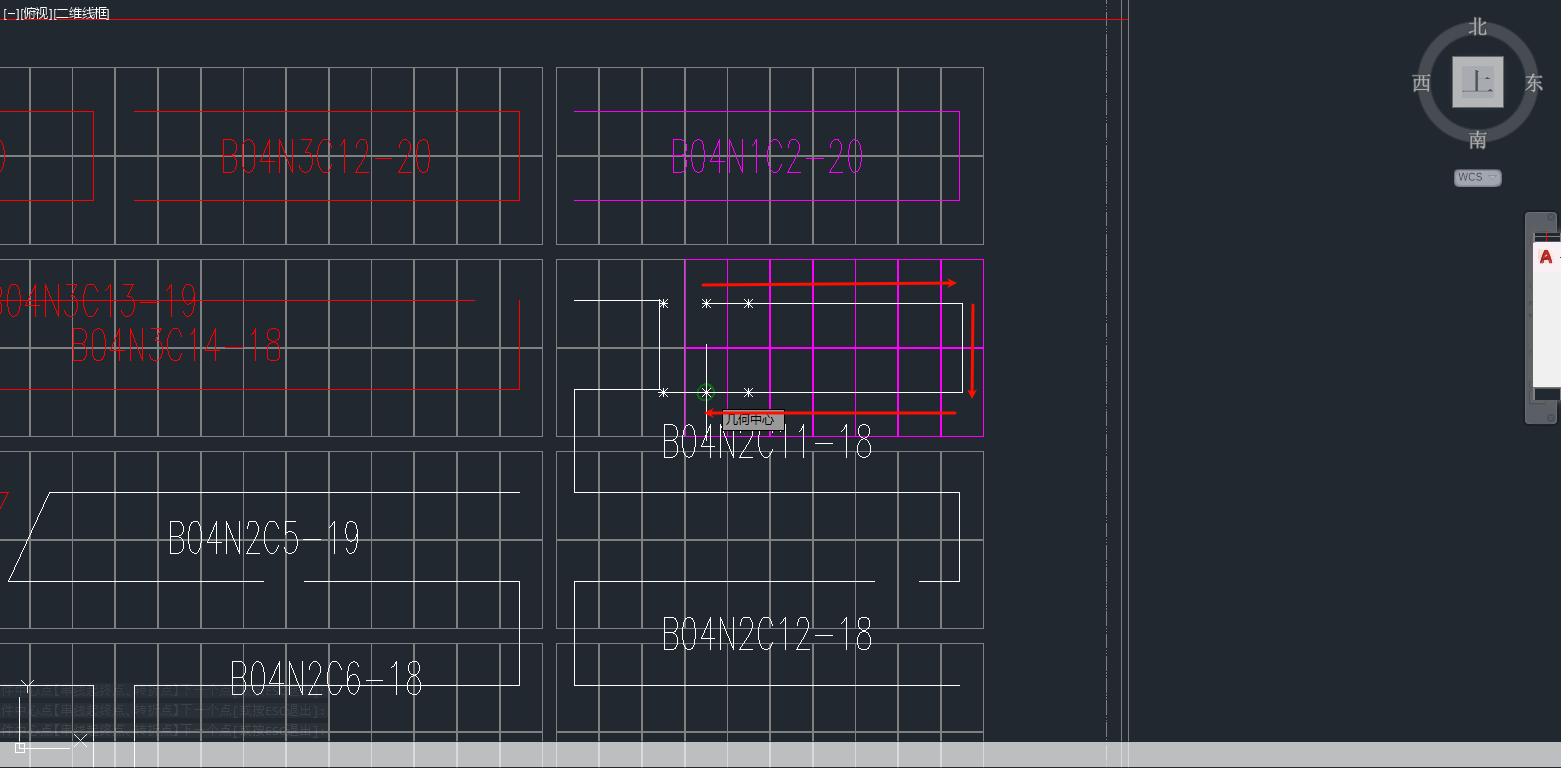
1)自选组件: 在组件上绘制串线路径,各个拐点必须点击,绘制的线自动变为 橙色 则串线成功
2)自选区域: 可单独对逆变器内的组件更换串线方式重新串线,下图中1号为C串线,2号为S串线,3号为一串线
2、使用汇流调整功能对自选组件串线后的串线进行归属调整
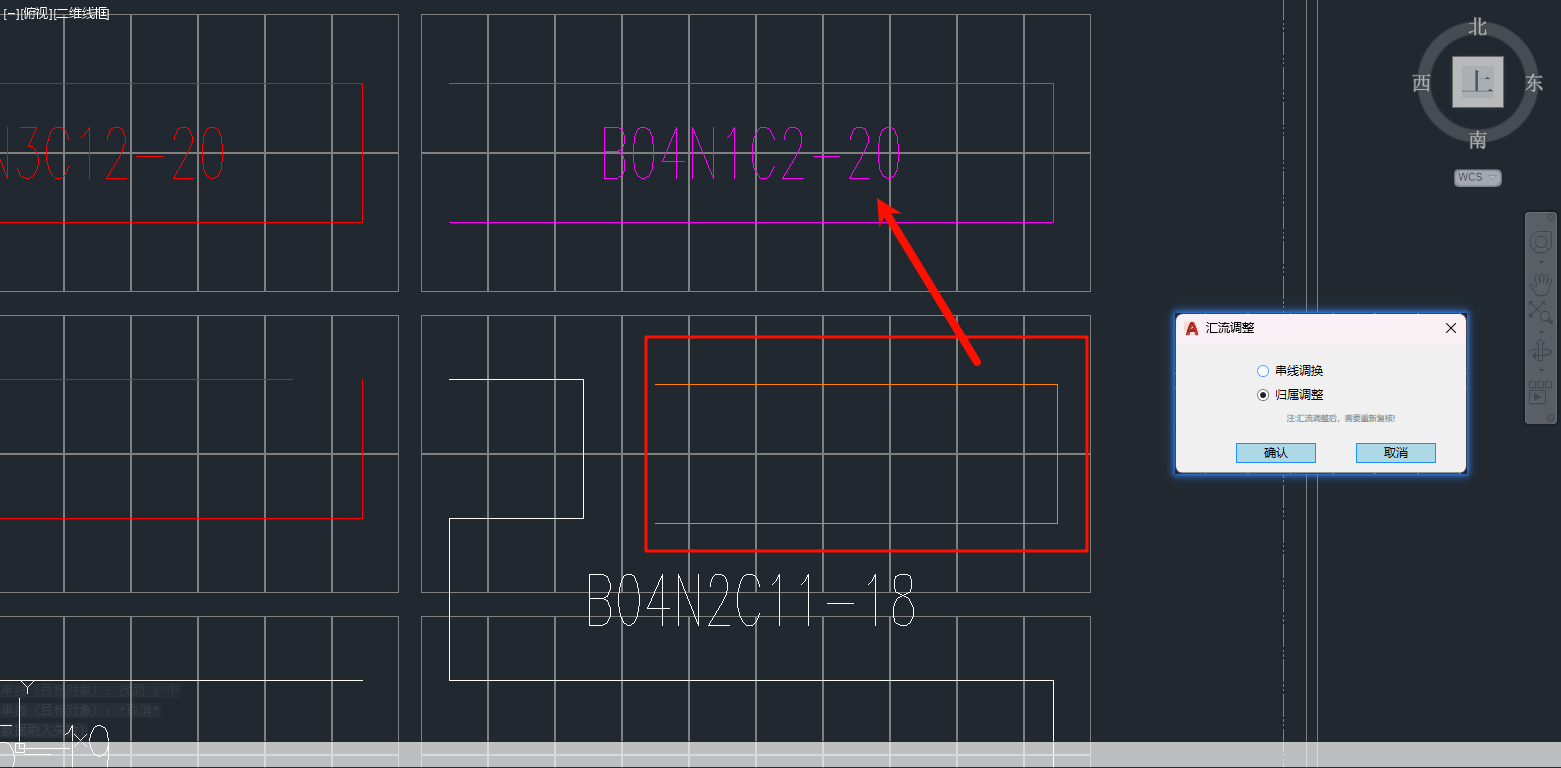
- 汇流调整包含
串线调换、归属调整
1)“串线调换”为两个不同逆变器下的串线,互相调换逆变器归属关系,点击串线调换,再分别点击需要调换的两个串线
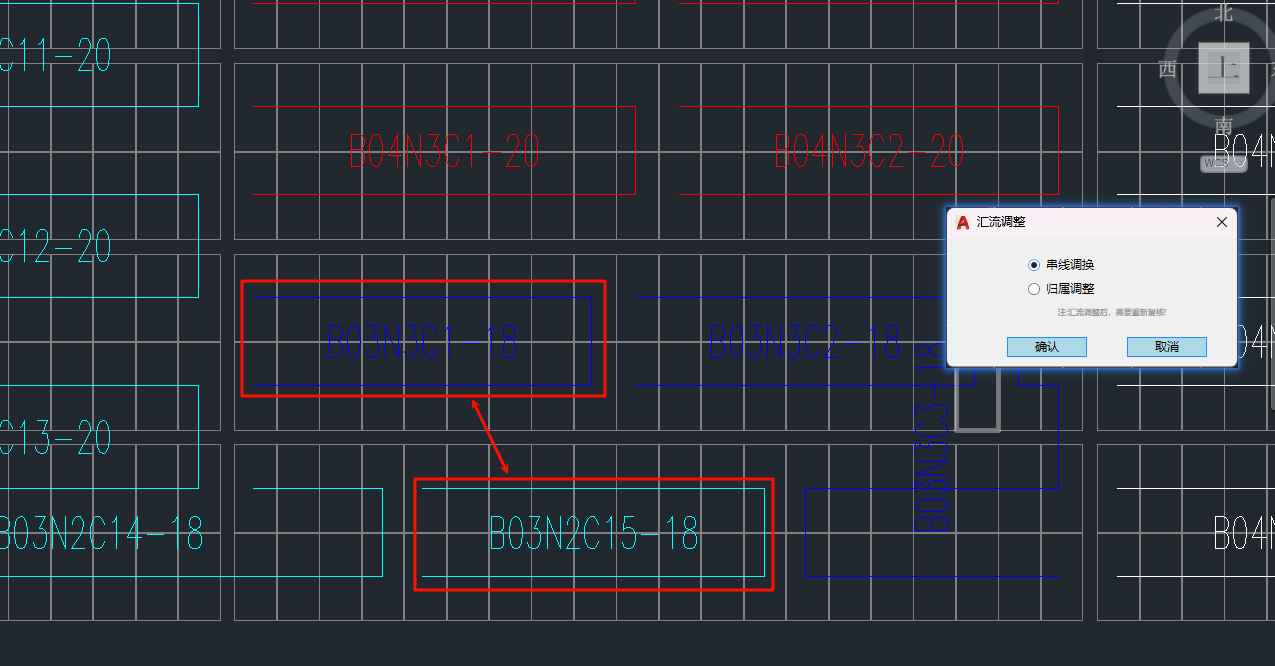
2)“归属调整”为将串线归属至另一个逆变器下,点击归属调整,点击目标串线,确认后,再选择需要修改归属的串线,可多选
注意: 手动串线的多段线必须重新进行汇流调整
3、使用汇流复核对逆变器下的串线进行MPPT的归属
- 汇流复核为将串线的最终结果重新编号,计算mppt是否符合逆变器的要求
- 点击汇流复核,系统自动对全部屋顶进行汇流复核
四、如何解决tif图导入不成功的问题
tif文件较大或缺少tfw格式文件时会出现CAD无法加载的情况,推荐使用大势DasViewer软件进行压缩,方法如下:
1、下载大势DasViewer软件,官网地址:https://www.daspatial.com/cn/dasviewer
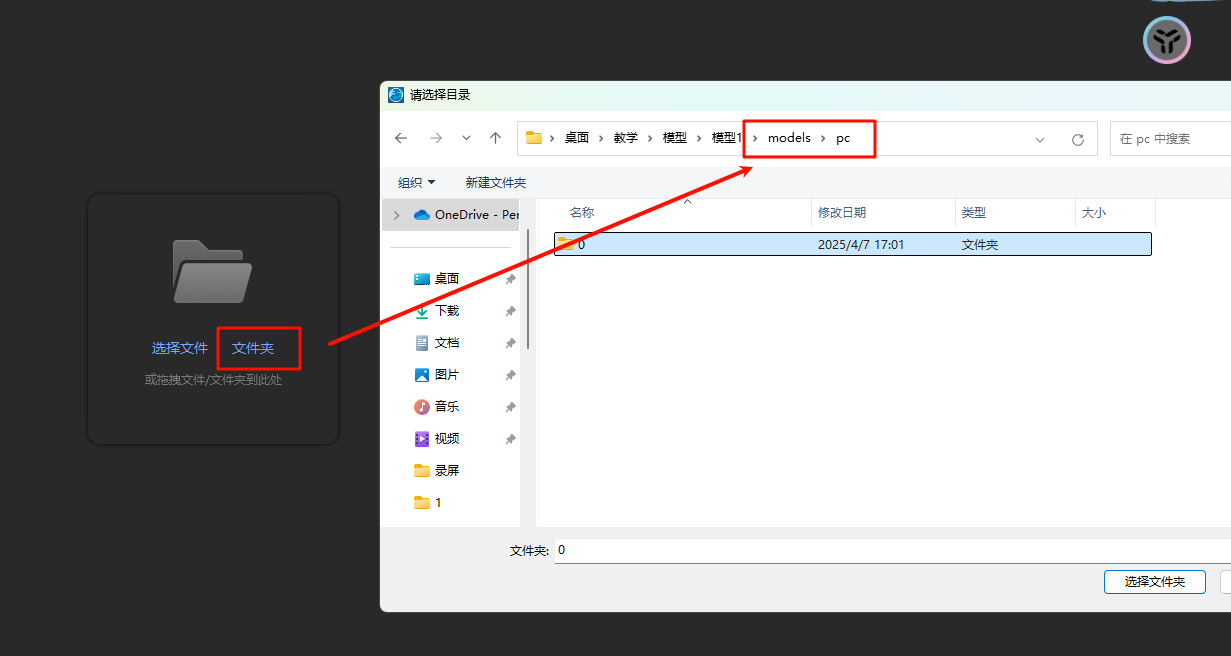
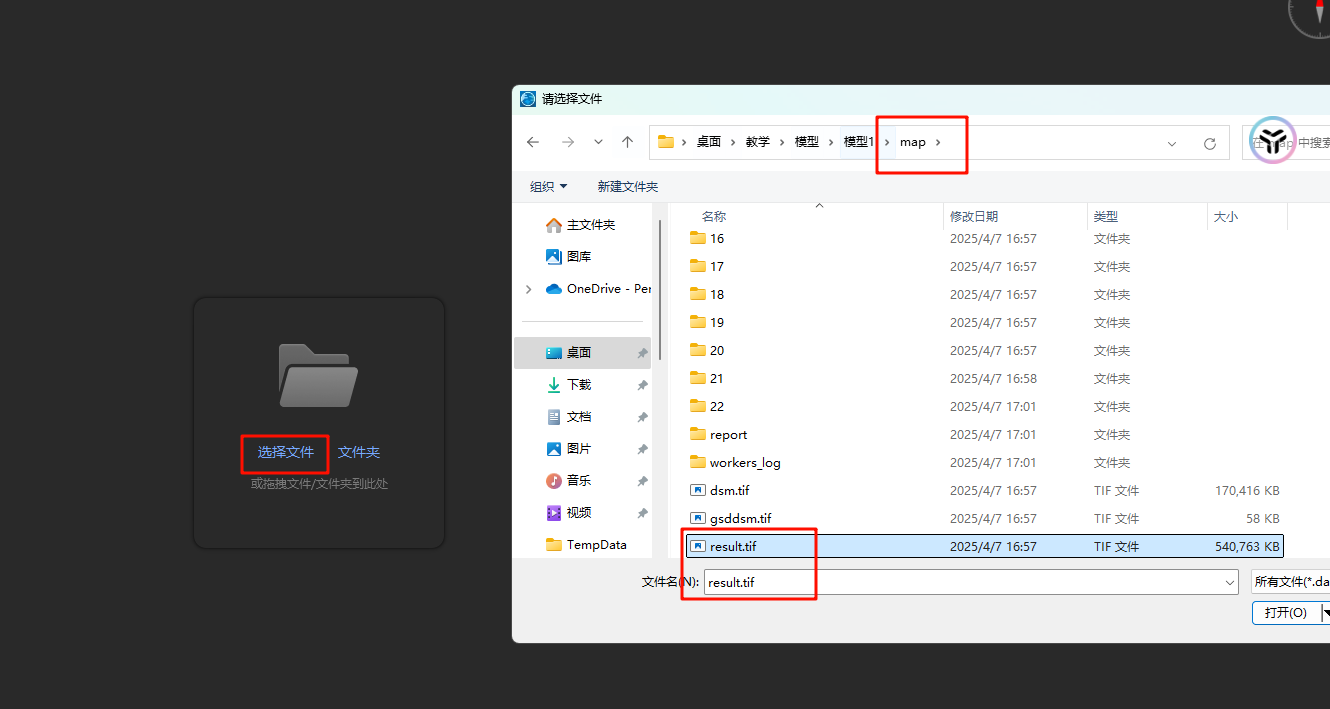
2、安装完成后,导入网页端中下载的模型(选择文件夹导入,导入modle/pc/0路径下文件夹)或者TIF图(选择文件导入,导入map/result.tif文件)
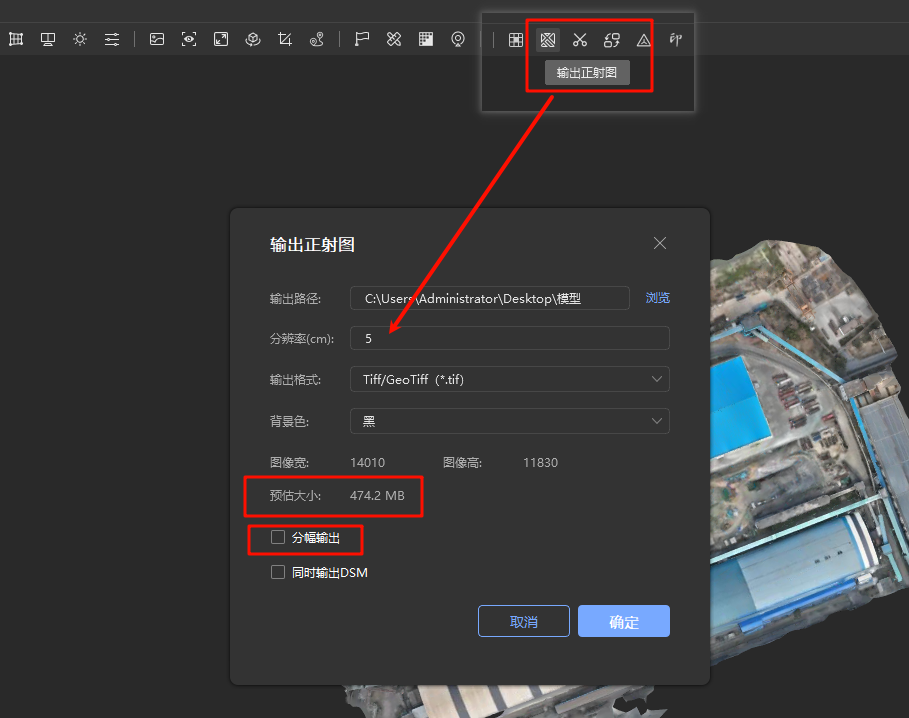
3、点击输出正射图按钮,确定输出路径后,输入分辨率会自动给出tif文件预估大小,文件大小必须小于1G,且取消分幅输出;
五、消费级无人机建模操作要求
- 无人机三维建模原理简单理解即多张具有一定重叠率的照片根据重叠部分的影像、点云数据合成三维模型,因此对照片的数量、重叠率均有要求,单张照片、重叠率低无法建模。
1.重叠率
- 重叠率是指两张照片重合的部分,重叠率又分航向重叠率与旁向重叠率。航向重叠率是指前后两个拍摄点位间的照片重叠率,旁向重叠率是指两条航线间的照片重叠率,示意如下:

上图中,无人机沿着航线飞行的过程中每隔一定的时间拍摄,假设A、B、C为拍摄点,则A、B两点间的照片重叠率即为航向重叠率,建模要求通常为80%以上,A、C两点间的照片重叠率即为旁向重叠率,建模要求通常为70%以上。
不具备航线飞行的无人机较难控制重叠率要求,建议按5m/s的飞行速度,每秒拍摄一张照片,航线间距离不要超出2s的飞行时间。
2.航线规划
- 为了保证照片数量与重叠率,飞行前需要进行航线规划,由于消费级无人机无此功能,只能手动规划航线。航线规划要求在于航线必须完全覆盖目标区域,并外扩一定距离(通常为30m),除此之外还需要正射摄影与倾斜摄影两种拍摄方式。
2.1 正射摄影
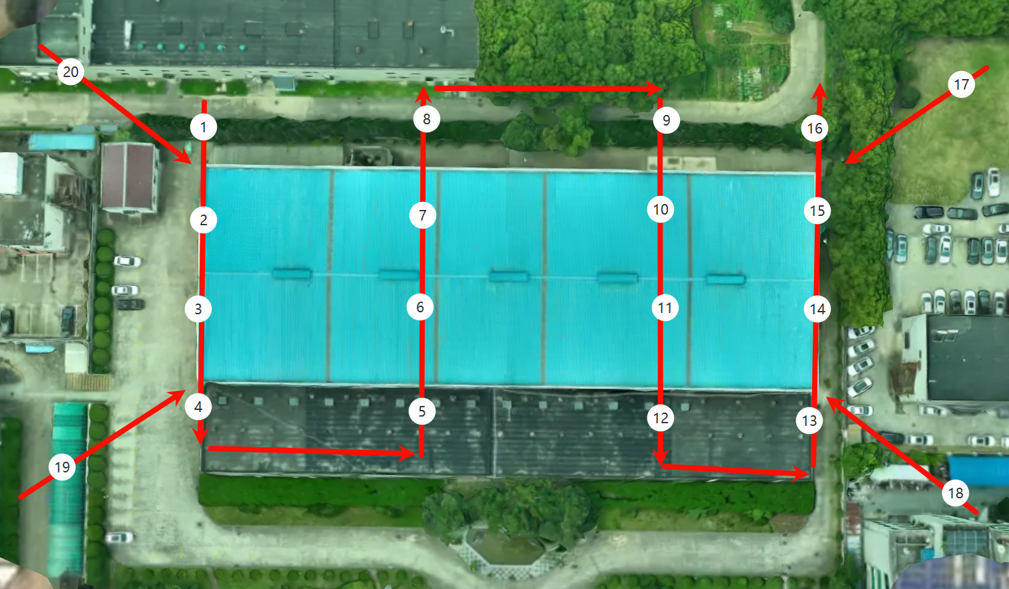
- 正射摄影,即无人机镜头不带倾角、完全俯视拍摄,有利于二维TIF图的建模。正射摄影通常一条航线即可,航线要求完全覆盖目标航拍区域并外扩30m,航线路径参考如下:

- 飞行高度可根据屋面面积进行判断,如飞行高度在80m以下、镜头俯视可拍到整个屋面范围,则飞行高度设置为当前高度;如无法完全覆盖,则飞行高度建议设置在80~100m范围,若周围障碍物较高,最高不得超出120m;飞行速度建议5m/s,每一秒拍摄一张照片,保证照片重叠率。
2.2 倾斜摄影
倾斜摄影即无人机镜头摆动一定倾角进行拍摄,倾斜摄影能有效建模出目标区域的高程信息,若无人机无镜头摆动功能,则只能正射摄影,建模后模型高程信息可能欠佳。
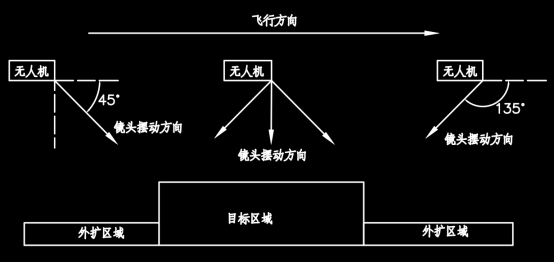
倾斜摄影航线需要设置垂直与水平两条,外扩距离仍为30m,两条航线重叠部分尽量完全覆盖目标区域,航线参考如下:

- 倾斜摄影航线飞行过程中镜头摆动角度原则:在外扩区域上方飞行时,镜头倾斜尽量多拍目标区域的高程;在目标区域上方飞行时,镜头三个角度循环拍摄,每个拍摄点一个角度,示意如下:
飞行高度与正射摄影保持一致,建议在80~100m范围,若周围障碍物较高,最高不得超出120m;飞行速度建议5m/s,每一秒拍摄一张照片,保证照片重叠率。
手动倾斜飞行建议在屋面四个拐角补充45°角拍摄,可以增加建模的效果和精度:
- 手动拍摄照片对操作者要求较高,且较难保证建模精度,建议多条航线、多角度拍摄,照片数量参考150张/万平。
3.总结
- 一、
飞行高度,可根据屋面面积进行判断,如飞行高度在80m以下、镜头俯视可拍到整个屋面范围,则飞行高度设置为当前高度;如无法完全覆盖,则飞行高度建议设置在80~100m范围,最高不得超出120m; - 二、
重叠率,照片拍摄间距不要太远,航线呈S形或者多条有交叉; - 三、
边距外扩,目标区域外扩一定距离,通常建议30m。 - 手动拍摄照片对操作者要求较高,且较难保证建模精度,建议多条航线、多角度拍摄;另外无人机拍摄不能仅拍摄屋面,厂区情况建议也拍摄,便于厂区线缆、屋面外障碍物等设计,照片数量参考150张/万平。
六、行业级无人机建模操作教程
- 行业级无人机是指功能复杂、满足行业多样化需求的无人机,光伏行业建模为了保证屋面轮廓、障碍物高度等准确性,要求无人机需要达到测绘级,即其建模精度需要能达到人工测绘的级别。
- 测绘级无人机的最大特点就是具备航线规划功能,以及可以加装RTK模板,其照片的分别率、重叠准确性大大高于消费级无人机,且操作简单、效率更高。
- 以大疆御3系列Mavic3Enterprise为例,飞行速度15m/s、建模精度3~5cm、支持垂直水平交叉航线飞行,十分适配分布式工商业场景。
1.机型介绍
- Mavic 3 Enterprise属于大疆御系列,简称M3E。
- M3E广角相机拥有4/3 英寸CMOS,2000万有效像素,单像元尺寸达3.3um,支持机械快门,最短连续拍照间隔可达0.7秒,配合RTK模块使用可达厘米级免像控测绘精度。巡航时间长达30分钟(含RTK),有效作业时长和作业半径大幅提升。
- 单架次可完成2平方公里的正射测绘任务。实测航拍面积10000m2,飞行高度70米,边距30m,旁向重叠70%,航向重叠80%,速度15m/s参数下的建图航拍任务,用时约30min,电池电量约剩余20%左右。


2.操作介绍
1、无人机起飞准备
注意观察周围环境,尽量将无人机置于空旷地面,保证周围没有强电磁干扰,如高压、强电等设备。
拆下无人机云台保护罩,防止云台校正时卡死故障—安装螺旋桨,注意螺旋桨颜色与安装孔位颜色保持一致—开启电源,电池短按一次后长按两秒开机。
遥控器连接手机热点,保证健康管理系统各模块正常,注意:
网络RTK必须正常打开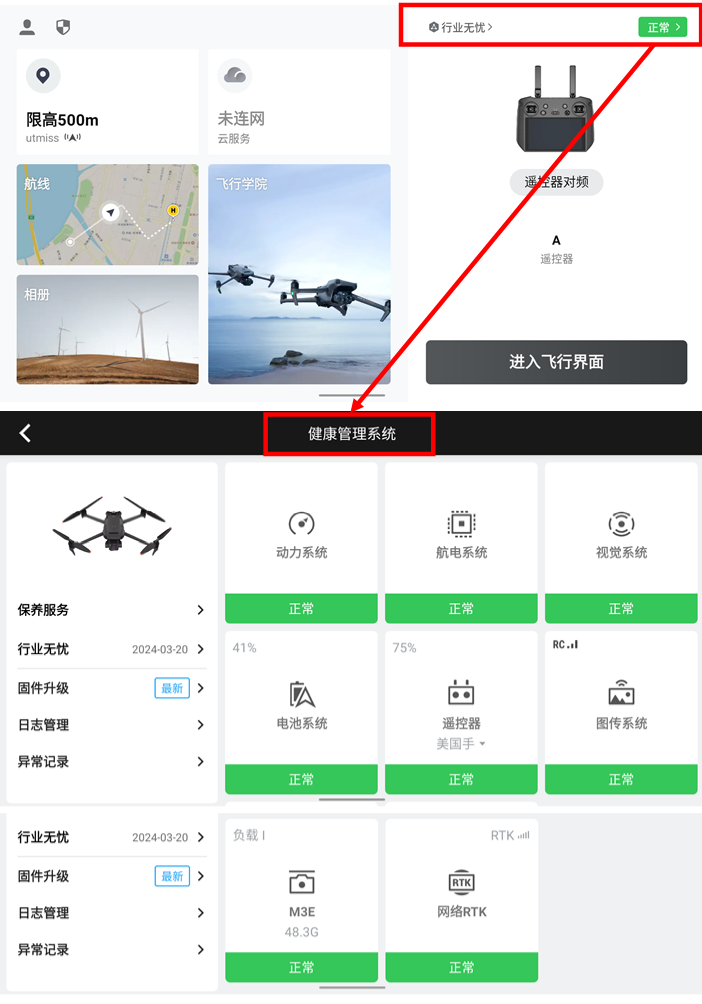
建议以电池满电状态时进行航拍,可设置电量降为20%即会返航,满电量电池一次飞行时长约为30min;
建议天气良好时进行航拍,阴天无风为最佳,阳光强烈时容易产生阴影、反光等不良影响,另外M3E无人机没有防水等级,尽量避免雨天飞行;
打开遥控器天线,天线最佳角度为45°仰角,尽量保持遥控器与无人机之间无遮挡。
2、航线航拍参数设置
- M3E支持自动航线规划、航线外扩、智能摆拍等功能,大大提高了建模的精度与便捷性。
- 点击航线—创建任务—面状航线
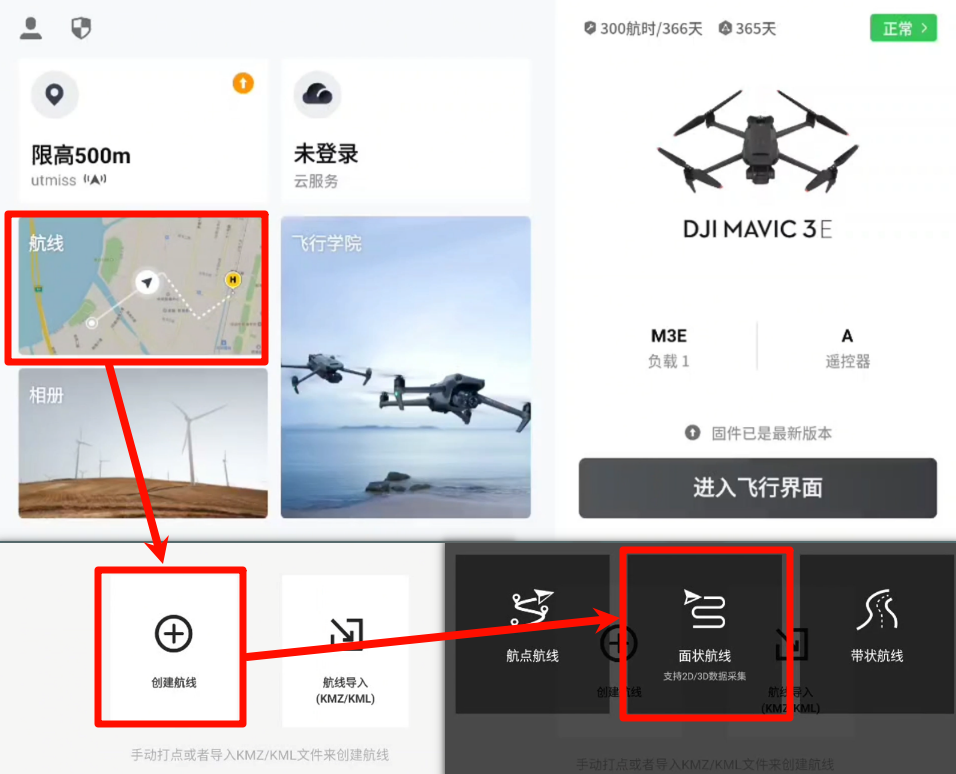
3、框选目标区域
- 进入框选区域页面,自动定位到当前所在位置—点击屏幕设置需要飞行的区域,为了保证模型边缘的精度、以及周边障碍物对目标区域的影响,建议适当扩大飞行的区域,最好能覆盖整个厂区。

3.参数设置
- 影响建模精度的主要因素有:航线规划、飞行高度、重叠率、边距
1、航线规划:
- M3E机型配备自动航线规划功能,设置目标区域后,遥控器自动生成航线,一个清晰精确的模型通常需要正射采集与倾斜采集两种航线共同完成。
①正射采集

②倾斜采集

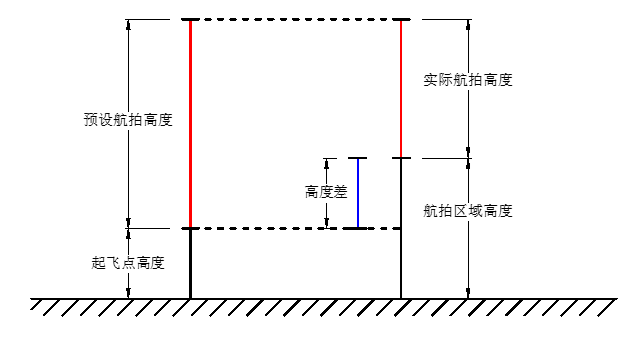
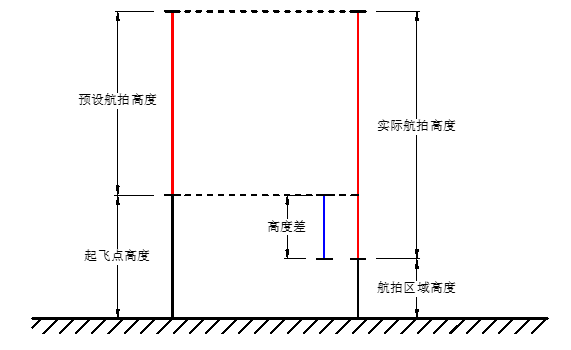
2、飞行高度:
即无人机航拍高度,与航拍区域高度间的相对关系如下:
①起飞点低于航拍区域时:航拍高度-高度差=无人机实际航拍高度

3、重叠率:
- 重叠率是指两张照片重合的部分,重叠率又分航向重叠率与旁向重叠率。航向重叠率是指前后两个拍摄点位间的照片重叠率,旁向重叠率是指两条航线间的照片重叠率,示意如下:
- 上图中,无人机沿着航线飞行的过程中每隔一定的时间拍摄,假设A、B、C为拍摄点,则A、B两点间的照片重叠率即为航向重叠率,建模要求通常为80%以上,A、C两点间的照片重叠率即为旁向重叠率,建模要求通常为70%以上。
4、边距
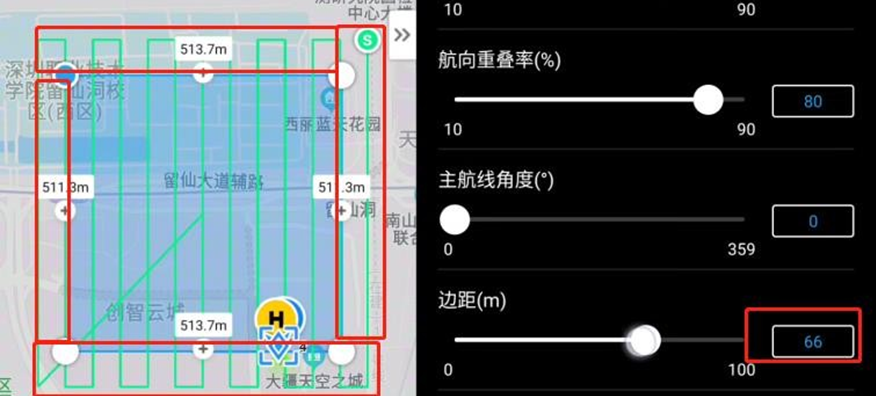
- 边距指航线与框选区域间的外扩距离,主要是为了保证框选区域边缘建模的清晰度。M3E机型倾斜采集航线自动外扩,无需设置边距;正射采集边距通常设置为30m左右,可满足大部分场景,如对建模精度要求极高可适当放大此数值。
5、其他参数
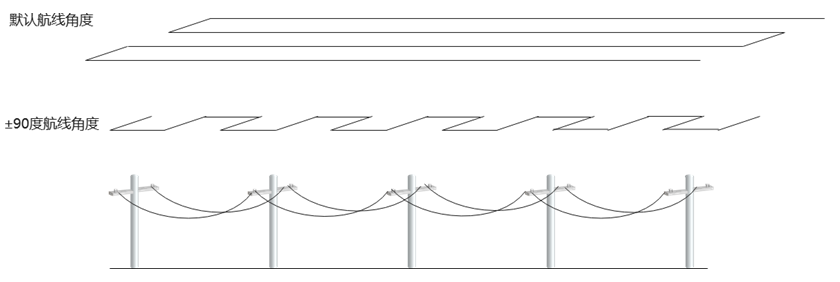
- 其他参数通常按默认即可,部分场景不同可适当修改,如主航线角度设置。
默认主航线角度为效率最优的设计方法,会自动实现最短路径执行完毕测区作业。但是在个别场景下,需要调整航线角度,来实现更好的成果质量,如电力线建模:采用±90 度的主航线角度,则可以生成更好的电力线点云。
- 起飞完成后无人机会自动沿着航线航拍,建议遥控器尽量能直接看到无人机,这样能保证信号通畅;
- 航线飞行完毕后无人机会自动返回起飞点,飞行过程中尽量不要距离起飞点过远。
4.注意事项
1、电量循环
- 以60%左右电量存储电池,飞行任务开始前充满电,每三个月充放电一次
2、防水
- 无防水等级,避免雨水天气飞行
3、起飞场地
- 尽量选择四周无遮挡的空地,注意周围障碍物高度
4、检查连接与设置
- 飞行前检查是否插入存储卡、电池是否有松动
5、数据保存
- 飞行后尽量将照片剪切到个人电脑上,飞行前保证容量充足
6、禁飞区域
- 起飞前应注意避开禁飞区域,如机场、政府单位等,以机场“糖果型”禁飞区域为例:
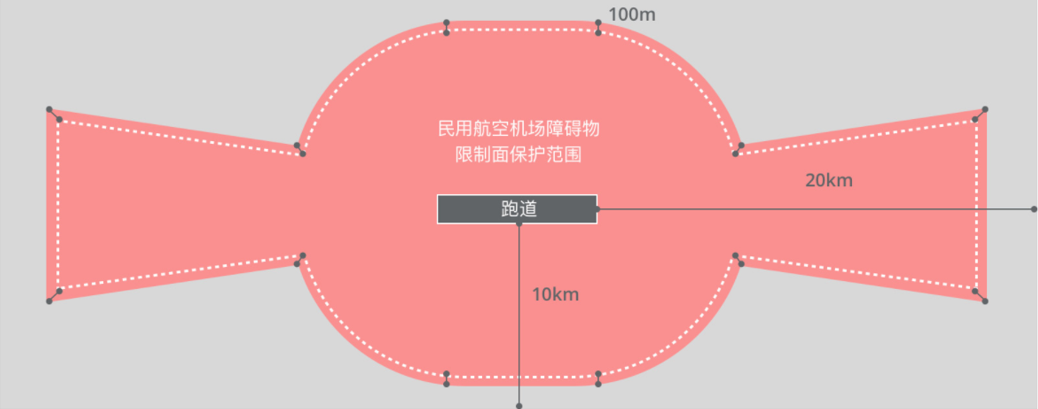
- 白色虚线:民用航空局定义的机场保护范围;
- 红色区域:禁飞区,为民用航空局定义的机场保护范围坐标向外拓展100米而形成的区域;
- 灰色区域:在跑道两端终点向外延伸20公里,跑道两侧各延伸10公里,形成约20公里宽、40公里长的长方形,为限高120米的限高区;
5.保险维修
1、行业无忧保险
- 大疆提供的基础保险服务,只换不修,仅提供意外损坏低价置换服务,若机身部分损坏维修需要自费,保额保费比较低,不同机型保费不同。
2、三者险
- 与汽车三者险一样,指无人机在空中飞行时,由于环境因数或机器设备本身原因造成无人机从空中掉下来摔坏或砸伤第三者造成的损失。
3、飞机失联
- 遥控器与无人机失去联系后,若无人机正常则两分钟左右会自动返回返航点,若仍未返航,注意查看遥控器上的失联点,寻找无人机。
4、“炸机”
- 无人机在飞行过程中一旦出现坠机损坏,行业一般称为“炸机”。首先需要找到坠落的飞机以及飞机其他部件残骸(飞机丢失无法定损),保留第一现场照片,先拍照片再回收。如果存在第三者损失,也是首先保留现场照片。拍照时从多个角度清晰拍照,最好开启照片时间印戳,便于记录出事时间。