消费级无人机建模操作要求
无人机三维建模原理简单理解即多张具有一定重叠率的照片根据重叠部分的影像、点云数据合成三维模型,因此对照片的数量、重叠率均有要求,单张照片、重叠率低无法建模。
1.重叠率
重叠率是指两张照片重合的部分,重叠率又分航向重叠率与旁向重叠率。航向重叠率是指前后两个拍摄点位间的照片重叠率,旁向重叠率是指两条航线间的照片重叠率,示意如下:

上图中,无人机沿着航线飞行的过程中每隔一定的时间拍摄,假设A、B、C为拍摄点,则A、B两点间的照片重叠率即为航向重叠率,建模要求通常为80%以上,A、C两点间的照片重叠率即为旁向重叠率,建模要求通常为70%以上。不具备航线飞行的无人机较难控制重叠率要求,建议按5m/s的飞行速度,每秒拍摄一张照片,航线间距离不要超出2s的飞行时间。
2.航线规划
为了保证照片数量与重叠率,飞行前需要进行航线规划,由于消费级无人机无此功能,只能手动规划航线。航线规划要求在于航线必须完全覆盖目标区域,并外扩一定距离(通常为30m),除此之外还需要正射摄影与倾斜摄影两种拍摄方式。
2.1 正射摄影
正射摄影,即无人机镜头不带倾角、完全俯视拍摄,有利于二维TIF图的建模。正射摄影通常一条航线即可,航线要求完全覆盖目标航拍区域并外扩30m,航线路径参考如下:

飞行高度建议在80~100m范围,若周围障碍物较高,最高不得超出120m;飞行速度建议5m/s,每一秒拍摄一张照片,保证照片重叠率。
2.2 倾斜摄影
倾斜摄影即无人机镜头摆动一定倾角进行拍摄,倾斜摄影能有效建模出目标区域的高程信息,若无人机无镜头摆动功能,则只能正射摄影,建模后模型高程信息可能欠佳。
倾斜摄影航线需要设置垂直与水平两条,外扩距离仍为30m,两条航线重叠部分尽量完全覆盖目标区域,航线参考如下:


手动拍摄照片对操作者要求较高,且较难保证建模精度,建议多条航线、多角度拍摄,照片数量参考150张/万平。
上传图片
1.点击右上角新建项目
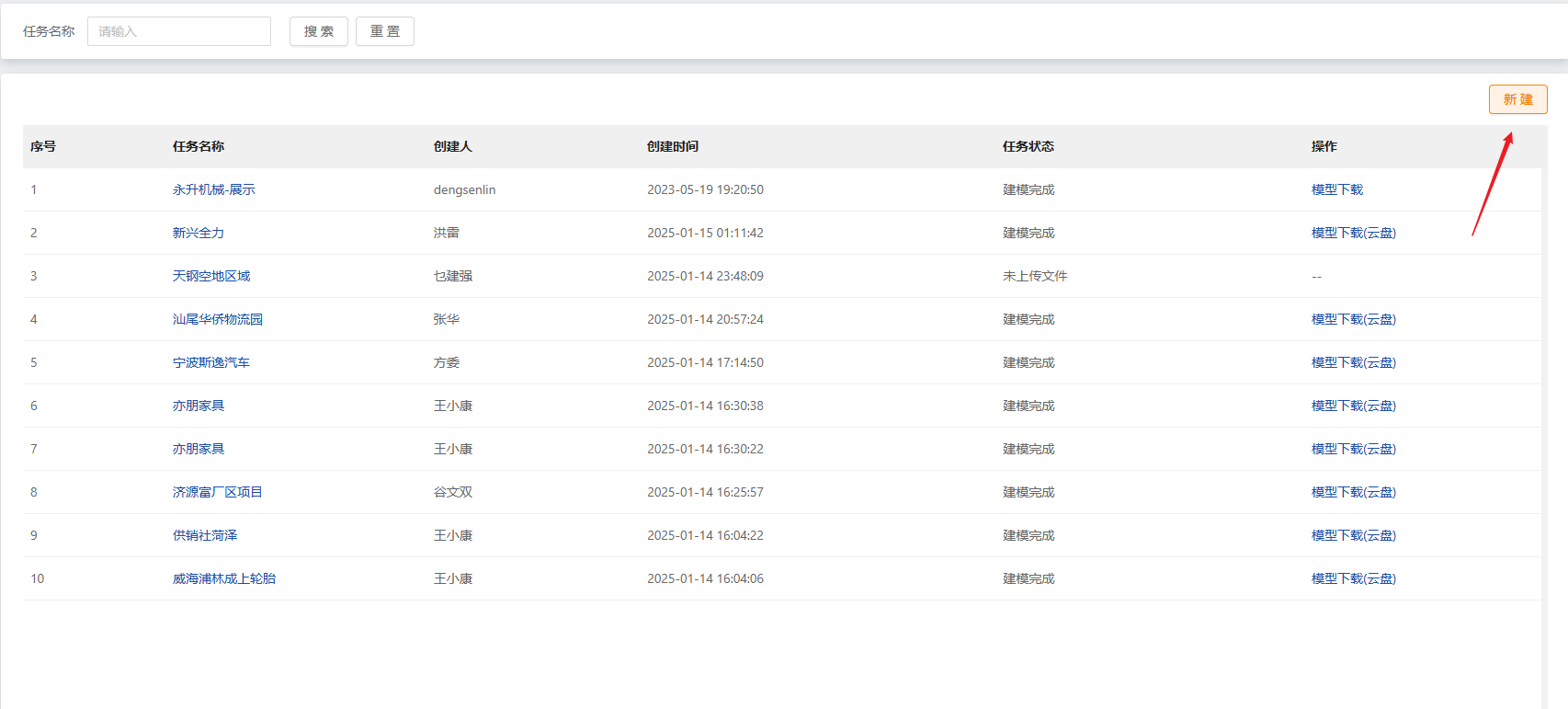
2.输入项目名称,点击上传按钮上传无人机拍摄的图片

一键建模
等待建模完成